






















 |
Motor de engranajes de 4 polos BLDC planetario sin escobillas DC para muebles / médicos / industria
Datos del producto:
| Lugar de origen: | Dongguan China |
| Nombre de la marca: | UCHI |
| Certificación: | Completed |
| Número de modelo: | El número de unidades de producción es el siguiente: |
Pago y Envío Términos:
| Cantidad de orden mínima: | 1000 piezas |
|---|---|
| Precio: | Negociable |
| Detalles de empaquetado: | Estándar |
| Tiempo de entrega: | Entre 5 y 7 días |
| Condiciones de pago: | T/T, Western Union |
| Capacidad de la fuente: | 5000 piezas de piezas |
|
Información detallada |
|||
| Número de polacos: | 4 | Rango de funcionamiento: | 9V ~ 16V |
|---|---|---|---|
| el par g.cm.: | 370 | Rango de aplicación: | Muebles/medicina/industria |
| Certificado: | 3C | Velocidad sin carga r/min: | 6000 |
| Corriente de no carga mA: | 680 | Velocidad nominal r/min: | 5000 |
| Poder clasificado W: | 19,0 | Número de fase: | 3 |
| Resaltar: | Motor de engranajes de corriente continua sin escobillas para muebles,Motor de engranajes de corriente continua sin escobillas para uso médico,Motor de engranajes planetarios de corriente continua para la industria |
||
Descripción de producto
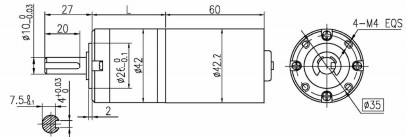
El rango de carga permitido: 1N.m~10N.m.
![]()
Datos técnicos del motor sin escobillas
| Tipo de producto | Número de postes |
Número de la fase |
En funcionamiento Rango de acción |
Nombrado tensión VDC |
Sin carga velocidad r/min |
Sin carga corriente - ¿Qué es? |
Nombrado torsión G.cm. |
Nombrado velocidad r/min |
Nombrado corriente A. No |
Nombrado potencia No |
||||||||||||||||
| B4260 a 1260 | 4 | 3 | 9V ~ 16V | 12 | 6000 | 680 | 370 | 5000 | 2.8 | 19.0 | ||||||||||||||||
| B4260 a 2460 | 4 | 3 | 9V ~ 26V | 24 | 6000 | 350 | 370 | 5300 | 1.4 | 20.1 | ||||||||||||||||
Datos técnicos del motor de engranajes sin escobillas
1.B4260-1260 Motor BLDC
| Ratio de reducción | 3.7 | 5.2 | 14 | 19 | 27 | 51 | 71 | 100 | 139 | 181 | 219 | 254 | 306 | 354 | 427 | 495 | ||||||||||
| Número de trenes de engranajes | 1 | 1 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | ||||||||||
| Duración ((L) | En el caso de los | 31.5 | 31.5 | 42.1 | 42.1 | 42.1 | 52.4 | 52.4 | 52.4 | 52.4 | 62.9 | 62.9 | 62.9 | 62.9 | 62.9 | 62.9 | 62.9 | |||||||||
| Velocidad sin carga | r/min | 1617 | 1158 | 429 | 316 | 222 | 118 | 85 | 60 | 43 | 33 | 27 | 24 | 20 | 17 | 14 | 12 | |||||||||
| Velocidad nominal | r/min | 1348 | 965 | 357 | 263 | 185 | 98 | 70 | 50 | 36 | 28 | 23 | 20 | 16 | 14 | 12 | 10 | |||||||||
| Torque nominal | N.m. | 0.12 | 0.17 | 0.41 | 0.56 | 0.79 | 1.4 | 1.9 | 2.6 | 3.7 | 4.3 | 5.2 | 6.0 | 7.2 | 8.4 | 10 | 10 | |||||||||
| Carga máxima permitida en un corto tiempo | N.m. | 3 | 3 | 12 | 12 | 12 | 25 | 25 | 25 | 25 | 30 | 30 | 30 | 30 | 30 | 30 | 30 | |||||||||
2. B4260-2460 Motor BLDC
| Ratio de reducción | 3.7 | 5.2 | 14 | 19 | 27 | 51 | 71 | 100 | 139 | 181 | 219 | 254 | 306 | 354 | 427 | 495 | ||||||||||
| Número de trenes de engranajes | 1 | 1 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | ||||||||||
| Duración ((L) | En el caso de los | 31.5 | 31.5 | 42.1 | 42.1 | 42.1 | 52.4 | 52.4 | 52.4 | 52.4 | 62.9 | 62.9 | 62.9 | 62.9 | 62.9 | 62.9 | 62.9 | |||||||||
| Velocidad sin carga | r/min | 1617 | 1158 | 429 | 316 | 222 | 118 | 85 | 60 | 43 | 33 | 27 | 24 | 20 | 17 | 14 | 12 | |||||||||
| Velocidad nominal | r/min | 1429 | 1023 | 379 | 279 | 196 | 104 | 75 | 53 | 38 | 29 | 24 | 21 | 17 | 15 | 12 | 11 | |||||||||
| Torque nominal | N.m. | 0.12 | 0.17 | 0.41 | 0.56 | 0.79 | 1.4 | 1.9 | 2.6 | 3.7 | 4.3 | 5.2 | 6.0 | 7.2 | 8.4 | 10 | 10 | |||||||||
| Carga máxima permitida en un corto tiempo | N.m. | 3 | 3 | 12 | 12 | 12 | 25 | 25 | 25 | 25 | 30 | 30 | 30 | 30 | 30 | 30 | 30 | |||||||||
Diagrama del cable
![]()
PIN 1# Retroalimentación n=60 * F/P, donde F representa la frecuencia de salida de retroalimentación y P representa 4 pares de pares de postes del motor.
PIN 2# Control del freno
PIN 3 # Regulación de velocidad PWM, entrada de señal PWM de 20 ~ 30 kHz y ajuste de la velocidad del motor ajustando el ciclo de trabajo.
PIN 4# La rotación hacia adelante y hacia atrás, el giro en suspensión es CW y el cortocircuito al giro a tierra es CCW.
PIN 5# Polo negativo de la fuente de alimentación
El polo positivo (línea azul) del motor está conectado al polo positivo de la fuente de alimentación, y el polo negativo (línea verde) del motor está conectado al polo negativo de la fuente de alimentación.PIN3 # y PIN5 # están conectados entre sí, y el motor funciona a toda velocidad.
Según el mismo requisito, durante el cambio hacia adelante y hacia atrás, PIN3 #, PIN4 # y PIN5 # deben estar conectados entre sí.
![]()
PIN 3 # Regulación de velocidad PWM, entrada de señal PWM de 20 ~ 30 kHz y ajuste de la velocidad del motor ajustando el ciclo de trabajo.
El PIN 4#La rotación hacia adelante y hacia atrás, el giro en suspensión es CW, y el cortocircuito al giro a tierra es CCW.
El PIN 5#Polo negativo de la fuente de alimentación