






















 |
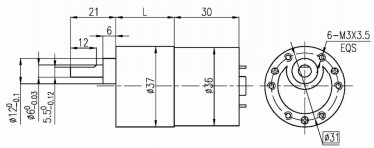
37 mm OD caja de cambios estándar BLDC motor de engranajes planetarios 8 polos
Datos del producto:
| Lugar de origen: | Dongguan China |
| Nombre de la marca: | UCHI |
| Certificación: | Completed |
| Número de modelo: | 37JB10K/B3630 |
Pago y Envío Términos:
| Cantidad de orden mínima: | 1000 piezas |
|---|---|
| Precio: | Negociable |
| Detalles de empaquetado: | Estándar |
| Tiempo de entrega: | Entre 5 y 7 días |
| Condiciones de pago: | T/T, Western Union |
| Capacidad de la fuente: | 5000 piezas de piezas |
|
Información detallada |
|||
| Número de polacos: | 8 | Rango de funcionamiento: | 9V ~ 16V / 9C ~ 24V |
|---|---|---|---|
| Corriente nominal mA: | 820/410 | Rango de aplicación: | Muebles/medicina/industria |
| Certificado: | 3C | Velocidad sin carga r/min: | 4680 |
| Corriente de no carga mA: | Las demás: | Velocidad nominal r/min: | 3500 |
| Poder clasificado W: | 3.2 | Número de fase: | 3 |
| Resaltar: | Motor de engranajes planetarios de 37 mm OD,Motor de engranajes planetarios de 8 polos,Motor de engranajes de 8 polos |
||
Descripción de producto
Rango de carga permitido: 1,0 N.m.
![]()
Datos técnicos del motor sin escobillas
| Tipo de producto | Número de postes |
Número de la fase |
En funcionamiento Rango de acción |
Nombrado tensión VDC |
Sin carga velocidad r/min |
Sin carga corriente - ¿Qué es? |
Nombrado torsión G.cm. |
Nombrado velocidad r/min |
Nombrado corriente - ¿Qué es? |
Nombrado potencia No |
|||||||||||||
| B3630-1247 El hecho de que el | 8 | 3 | 9V ~ 16V | 12 | 4680 | 270 | 90 | 3500 | 820 | 3.2 | |||||||||||||
| B3630-2447 Las autoridades de los Estados miembros | 8 | 3 | 9V ~ 26V | 24 | 4680 | 140 | 90 | 3500 | 410 | 3.2 | |||||||||||||
Datos técnicos del motor de engranajes sin escobillas
1.B3630-1247 Motor BLDC para el cual se ha establecido un sistema de control de velocidad.
| Ratio de reducción | 6 | 10 | 18 | 30 | 50 | 75 | 100 | 150 | 200 | 250 | 300 | ||||||||||||
| Número de trenes de engranajes | 2 | 2 | 3 | 3 | 4 | 4 | 4 | 5 | 5 | 5 | 5 | ||||||||||||
| Duración ((L) | En el caso de los | 21.5 | 21.5 | 26.5 | 26.5 | 29.0 | 29.0 | 29.0 | 31.5 | 31.5 | 31.5 | 31.5 | |||||||||||
| Velocidad sin carga | r/min | 780 | 468 | 260 | 156 | 94 | 62 | 47 | 31 | 23 | 19 | 16 | |||||||||||
| Velocidad nominal | r/min | 583 | 350 | 194 | 117 | 70 | 47 | 35 | 23 | 18 | 14 | 12 | |||||||||||
| Torque nominal | N.m. | 0.043 | 0.071 | 0.12 | 0.19 | 0.29 | 0.43 | 0.57 | 0.78 | 1 | 1 | 1 | |||||||||||
| Carga máxima permitida en un corto tiempo | N.m. | 0.5 | 0.5 | 1 | 1 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | |||||||||||
2.B3630-2447 Motor BLDC El motor BLDC es un motor de alta velocidad que tiene una capacidad de transmisión de energía superior a 100 W.
| Ratio de reducción | 6 | 10 | 18 | 30 | 50 | 75 | 100 | 150 | 200 | 250 | 300 | ||||||||||||
| Número de trenes de engranajes | 2 | 2 | 3 | 3 | 4 | 4 | 4 | 5 | 5 | 5 | 5 | ||||||||||||
| Duración ((L) | En el caso de los | 21.5 | 21.5 | 26.5 | 26.5 | 29.0 | 29.0 | 29.0 | 31.5 | 31.5 | 31.5 | 31.5 | |||||||||||
| Velocidad sin carga | r/min | 780 | 468 | 260 | 156 | 94 | 62 | 47 | 31 | 23 | 19 | 16 | |||||||||||
| Velocidad nominal | r/min | 583 | 350 | 194 | 117 | 70 | 47 | 35 | 23 | 18 | 14 | 12 | |||||||||||
| Torque nominal | N.m. | 0.043 | 0.071 | 0.12 | 0.19 | 0.29 | 0.43 | 0.57 | 0.78 | 1 | 1 | 1 | |||||||||||
| Carga máxima permitida en un corto tiempo | N.m. | 0.5 | 0.5 | 1 | 1 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | |||||||||||
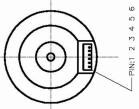
Diagrama del cable
![]()
PIN 1# (azul) Control del freno
PIN 2# (naranja) Regulación de velocidad PWM: Introduzca una señal PWM de 20 ~ 30 kHz y ajuste la velocidad del motor ajustando el ciclo de trabajo.
PIN 3# (Negro) Polo negativo de la fuente de alimentación
PIN 4# (blanco) Rotación hacia adelante y hacia atrás: la dirección en suspensión es CCW, cortocircuito a tierra es CW.
PIN 5# (verde) Retroalimentación n=60 * F/P, donde F es la frecuencia de retroalimentación y P son 4 pares de pares de postes del motor.
PIN 6# (rojo) Polo positivo de alimentación
longitud de la línea de conexión 200 mm
![]()
PIN 3 # Regulación de velocidad PWM, entrada de señal PWM de 20 ~ 30 kHz y ajuste de la velocidad del motor ajustando el ciclo de trabajo.
El PIN 4#La rotación hacia adelante y hacia atrás, el giro en suspensión es CW, y el cortocircuito al giro a tierra es CCW.
El PIN 5#Polo negativo de la fuente de alimentación