






















 |
Motor de engranajes planetarios BLDC integrado en el conductor con caja de engranajes planetarios OD de 22 mm 12 polos
Datos del producto:
| Lugar de origen: | Dongguan China |
| Nombre de la marca: | UCHI |
| Certificación: | Completed |
| Número de modelo: | 22JXE3K/B2418 |
Pago y Envío Términos:
| Cantidad de orden mínima: | 1000pcs |
|---|---|
| Precio: | Negociable |
| Detalles de empaquetado: | Estándar |
| Tiempo de entrega: | 5-7 días |
| Condiciones de pago: | T/t, unión occidental |
| Capacidad de la fuente: | 5000 piezas de piezas |
|
Información detallada |
|||
| Número de polos: | 12 | Rango operativo: | 9V ~ 16V / 9C ~ 26V |
|---|---|---|---|
| Válvula de voltaje nominal VDC: | 24/12 | Certificado: | 3C |
| Velocidad sin carga r/min: | 7500 | Corriente de no carga mA: | 100/85 |
| Velocidad nominal r/min: | 5800 | Poder clasificado W: | 1.8 |
| Resaltar: | Motor de engranajes planetarios BLDC de 22 mm,motor de engranajes planetarios construido en el conductor,Motor de engranajes planetarios BLDC de 12 polos |
||
Descripción de producto
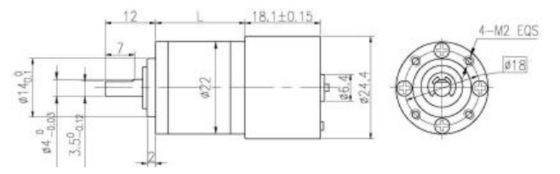
El rango de carga permitido: 0,03 N.m~0,3 N.m.
![]()
Datos técnicos del motor sin escobillas
| Tipo de producto | Número de postes |
Número de la fase |
En funcionamiento Rango de acción |
Nombrado tensión VDC |
Sin carga velocidad r/min |
Sin carga corriente - ¿Qué es? |
Nombrado torsión G.cm. |
Nombrado velocidad r/min |
Nombrado corriente - ¿Qué es? |
Nombrado potencia No |
|||||||||||||
| B2418 a 1275 | 12 | 3 | 9V ~ 16V | 12 | 7500 | 100 | 30 | 5800 | 320 | 1.8 | |||||||||||||
| B2418 a 2475 | 12 | 3 | 9V ~ 26V | 24 | 7500 | 85 | 30 | 5800 | 200 | 1.8 | |||||||||||||
Datos técnicos del motor de engranajes sin escobillas
1.B2418-1275 Motor BLDC
![]()
2.B2418-2475 Motor BLDC El motor BLDC es un motor de alta velocidad que tiene una capacidad de transmisión de energía superior a 100 W.
![]()
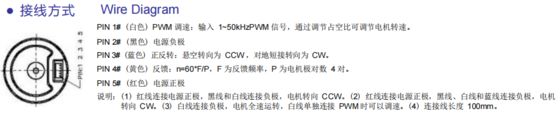
Diagrama del cable
![]()
PIN 1# (blanco) Regulación de velocidad PWM: Introduzca una señal PWM de 1 ~ 50kHz y ajuste la velocidad del motor ajustando el ciclo de trabajo.
PIN 2# (Negro) Polo negativo de la fuente de alimentación
PIN 3# (azul) Rotación hacia adelante y hacia atrás: la dirección en suspensión es CCW, cortocircuito a tierra es CW.
PIN 4# (amarillo) Feedback n=60 * F/P, donde F es la frecuencia de retroalimentación y P son 4 pares de pares de postes del motor.
PIN 5# (rojo) Polo positivo de alimentación
Nota:
(1) Conecte el cable rojo al terminal positivo de la fuente de alimentación y conecte los cables blanco y negro al terminal negativo.
(2) Conecte el cable rojo al terminal positivo de la fuente de alimentación y conecte los cables negro, blanco y azul al terminal negativo.
(3) Conecte el cable blanco al terminal negativo. El motor funcionará a toda velocidad. Cuando el cable blanco está conectado al PWM por separado, la velocidad se puede ajustar.
(4) longitud de la línea de conexión 100 mm